U-Net
이번 페이지에서는 UNet을 이용해 f-minst 데이터셋을 압축하고 해제 후 인코더의 결과물을 디코더에서 재사용해 reconstruction 하는 모델에 대해서 설명합니다.
Dataset
우선 튜토리얼에 들어가기에 앞서 사용할 데이터셋을 선언합니다. 데이터셋에 대한 자세한 설명은 Fashion-MNIST 페이지에서 확인할 수 있습니다.
from torchvision.transforms import Compose, ToTensor, Lambda
from torchvision.datasets.mnist import FashionMNIST
from torch.utils.data import DataLoader
transform = Compose(
[
ToTensor(),
Lambda(lambda x: (x - 0.5) * 2),
]
)
dataset = FashionMNIST("./datasets", download=True, train=True, transform=transform)
loader = DataLoader(dataset, batch_size=128, shuffle=True)
Encoder & Decoder
이제 본격적으로 모델 코드를 작성해 보겠습니다.
이번 예제에서는 앞선 Vanila AutoEncoder 에서 사용한 블록을 사용합니다.
import torch
import torch.nn as nn
class AutoEncoderBlock(nn.Module):
def __init__(
self,
shape,
in_channel,
out_channel,
kernel_size=3,
stride=1,
padding=1,
activation=None,
normalize=True,
):
super().__init__()
self.layer_norm = nn.LayerNorm(shape)
self.conv_1 = nn.Conv2d(in_channel, out_channel, kernel_size, stride, padding)
self.conv_2 = nn.Conv2d(out_channel, out_channel, kernel_size, stride, padding)
self.activation = nn.SiLU() if activation is None else activation
self.normalize = normalize
def forward(self, x):
out = self.layer_norm(x) if self.normalize else x
out = self.conv_1(out)
out = self.activation(out)
out = self.conv_2(out)
out = self.activation(out)
return out
UNet
이번에는 UNet 의 모델을 작성해 보겠습니다.
class UNet(nn.Module):
def __init__(self):
super().__init__()
# encoder
## layer 1
self.layer_1_block = nn.Sequential(
AutoEncoderBlock(shape=(1, 28, 28), in_channel=1, out_channel=10),
AutoEncoderBlock(shape=(10, 28, 28), in_channel=10, out_channel=10),
AutoEncoderBlock(shape=(10, 28, 28), in_channel=10, out_channel=10),
)
self.layer_1_down = nn.Conv2d(10, 10, 4, 2, 1)
## layer 2
self.layer_2_block = nn.Sequential(
AutoEncoderBlock(shape=(10, 14, 14), in_channel=10, out_channel=20),
AutoEncoderBlock(shape=(20, 14, 14), in_channel=20, out_channel=20),
AutoEncoderBlock(shape=(20, 14, 14), in_channel=20, out_channel=20),
)
self.layer_2_down = nn.Conv2d(20, 20, 4, 2, 1)
## layer 3
self.layer_3_block = nn.Sequential(
AutoEncoderBlock(shape=(20, 7, 7), in_channel=20, out_channel=40),
AutoEncoderBlock(shape=(40, 7, 7), in_channel=40, out_channel=40),
AutoEncoderBlock(shape=(40, 7, 7), in_channel=40, out_channel=40),
)
self.layer_3_down = nn.Sequential(
nn.Conv2d(40, 40, 2, 1), nn.SiLU(), nn.Conv2d(40, 40, 4, 2, 1)
)
# decoder
## layer 4
self.layer_4_up = nn.Sequential(
nn.ConvTranspose2d(40, 40, 4, 2, 1),
nn.SiLU(),
nn.ConvTranspose2d(40, 40, 2, 1),
)
self.layer_4_block = nn.Sequential(
AutoEncoderBlock(shape=(80, 7, 7), in_channel=80, out_channel=40),
AutoEncoderBlock(shape=(40, 7, 7), in_channel=40, out_channel=20),
AutoEncoderBlock(shape=(20, 7, 7), in_channel=20, out_channel=20),
)
## layer 5
self.layer_5_up = nn.ConvTranspose2d(20, 20, 4, 2, 1)
self.layer_5_block = nn.Sequential(
AutoEncoderBlock(shape=(40, 14, 14), in_channel=40, out_channel=20),
AutoEncoderBlock(shape=(20, 14, 14), in_channel=20, out_channel=10),
AutoEncoderBlock(shape=(10, 14, 14), in_channel=10, out_channel=10),
)
## layer 6
self.layer_6_up = nn.ConvTranspose2d(10, 10, 4, 2, 1)
self.layer_6_block = nn.Sequential(
AutoEncoderBlock(shape=(20, 28, 28), in_channel=20, out_channel=10),
AutoEncoderBlock(shape=(10, 28, 28), in_channel=10, out_channel=10),
AutoEncoderBlock(
shape=(10, 28, 28), in_channel=10, out_channel=10, normalize=False
),
)
self.conv_out = nn.Conv2d(10, 1, 3, 1, 1)
def forward(self, x):
# encoding
out_1_block_result = self.layer_1_block(x) # (N, 10, 28, 28)
out_1_down_result = self.layer_1_down(out_1_block_result) # (N, 10, 14, 14)
out_2_block_result = self.layer_2_block(out_1_down_result) # (N, 20, 14, 14)
out_2_down_result = self.layer_2_down(out_2_block_result) # (N, 20, 7, 7)
out_3_block_result = self.layer_3_block(out_2_down_result) # (N, 40, 7, 7)
out_3_down_result = self.layer_3_down(out_3_block_result) # (N, 40, 3, 3)
# decoding
out_4_up_result = self.layer_4_up(out_3_down_result) # (N, 40, 7, 7)
out_4_concat_down_up = torch.cat(
(out_3_block_result, out_4_up_result), dim=1
) # (N, 80, 7, 7)
out_4_block_result = self.layer_4_block(out_4_concat_down_up) # (N, 20, 7, 7)
out_5_up_result = self.layer_5_up(out_4_block_result) # (N, 20, 14, 14)
out_5_concat_down_up = torch.cat(
(out_2_block_result, out_5_up_result), dim=1
) # (N, 40, 14, 14)
out_5_block_result = self.layer_5_block(out_5_concat_down_up) # (N, 10, 14, 14)
out_6_up_result = self.layer_6_up(out_5_block_result) # (N, 10, 28, 28)
out_6_concat_down_up = torch.cat(
(out_1_block_result, out_6_up_result), dim=1
) # (N, 20, 28, 28)
out_6_block_result = self.layer_6_block(out_6_concat_down_up) # (N, 10, 28, 28)
out = self.conv_out(out_6_block_result) # (N, 1, 28, 28)
return out
한번 해당 블록의 내부 코드가 어떻게 동작하는 지 확인해 보도록 하겠습니다.
unet = UNet()
for batch in loader:
x = batch[0]
break
with torch.no_grad():
# encoding
out_1_block_result = unet.layer_1_block(x) # (N, 10, 28, 28)
out_1_down_result = unet.layer_1_down(out_1_block_result) # (N, 10, 14, 14)
out_2_block_result = unet.layer_2_block(out_1_down_result) # (N, 20, 14, 14)
out_2_down_result = unet.layer_2_down(out_2_block_result) # (N, 20, 7, 7)
out_3_block_result = unet.layer_3_block(out_2_down_result) # (N, 40, 7, 7)
out_3_down_result = unet.layer_3_down(out_3_block_result) # (N, 40, 3, 3)
# decoding
out_4_up_result = unet.layer_4_up(out_3_down_result) # (N, 40, 7, 7)
out_4_concat_down_up = torch.cat(
(out_3_block_result, out_4_up_result), dim=1
) # (N, 80, 7, 7)
out_4_block_result = unet.layer_4_block(out_4_concat_down_up) # (N, 20, 7, 7)
out_5_up_result = unet.layer_5_up(out_4_block_result) # (N, 20, 14, 14)
out_5_concat_down_up = torch.cat(
(out_2_block_result, out_5_up_result), dim=1
) # (N, 40, 14, 14)
out_5_block_result = unet.layer_5_block(out_5_concat_down_up) # (N, 10, 14, 14)
out_6_up_result = unet.layer_6_up(out_5_block_result) # (N, 10, 28, 28)
out_6_concat_down_up = torch.cat(
(out_1_block_result, out_6_up_result), dim=1
) # (N, 20, 28, 28)
out_6_block_result = unet.layer_6_block(out_6_concat_down_up) # (N, 10, 28, 28)
out = unet.conv_out(out_6_block_result) # (N, 1, 28, 28)
위의 모델을 통해 reconstruction 된 결과물을 확인해 보겠습니다.
import matplotlib.pyplot as plt
from torchvision.utils import make_grid
out_x_grid = make_grid(out, nrow=12).numpy()
plt.figure(figsize=(8, 8))
plt.title("First batch reconstruction")
plt.imshow(out_x_grid[0], cmap="gray")
Train
이제 모델을 학습해 이미지를 reconstruction 하는 결과를 확인해 보겠습니다.
Convolution Network 는 원활한 학습을 위해서는 gpu 가 필요합니다. GPU 가 없는 경우 학습에 다소 시간이 소요될 수 있습니다. 아래 코드를 이용해 device 를 선언합니다.
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
만약 gpu 가 사용 가능한 경우 device(type='cuda') 메세지가 나옵니다.
위에서 선언한 모델을 gpu 메모리로 옮기겠습니다.
_ = unet.to(device)
학습을 위한 코드를 작성해 보겠습니다.
import torch.optim as optim
from tqdm import tqdm
mse_fn = nn.MSELoss()
optimizer = optim.Adam(unet.parameters(), lr=0.001)
n_epochs = 10
for epoch in range(n_epochs):
epoch_loss = 0.0
for step, batch in enumerate(tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}")):
x = batch[0].to(device)
recon_x = unet(x)
loss = mse_fn(x, recon_x)
optimizer.zero_grad()
loss.backward()
optimizer.step()
epoch_loss += loss.item() * len(x) / len(loader.dataset)
log_string = f"Loss at epoch {epoch + 1}: {epoch_loss:.3f}"
print(log_string)
학습을 진행하면 아래와 같은 결과를 얻을 수 있습니다.
Epoch 1/10: 100%|██████████| 469/469 [00:16<00:00, 29.02it/s]
Loss at epoch 1: 0.065
Epoch 2/10: 100%|██████████| 469/469 [00:13<00:00, 34.70it/s]
Loss at epoch 2: 0.009
Epoch 3/10: 100%|██████████| 469/469 [00:13<00:00, 34.31it/s]
Loss at epoch 3: 0.005
Epoch 4/10: 100%|██████████| 469/469 [00:13<00:00, 34.63it/s]
Loss at epoch 4: 0.003
Epoch 5/10: 100%|██████████| 469/469 [00:13<00:00, 33.93it/s]
Loss at epoch 5: 0.003
Epoch 6/10: 100%|██████████| 469/469 [00:13<00:00, 34.25it/s]
Loss at epoch 6: 0.002
Epoch 7/10: 100%|██████████| 469/469 [00:13<00:00, 35.09it/s]
Loss at epoch 7: 0.002
Epoch 8/10: 100%|██████████| 469/469 [00:13<00:00, 34.66it/s]
Loss at epoch 8: 0.001
Epoch 9/10: 100%|██████████| 469/469 [00:13<00:00, 34.26it/s]
Loss at epoch 9: 0.001
Epoch 10/10: 100%|██████████| 469/469 [00:14<00:00, 33.17it/s]
Loss at epoch 10: 0.001
학습이 정상적으로 수행되었는지 실제 이미지를 확인해 보겠습니다.
데이터 로더에서 하나의 배치의 원본 데이터와 학습된 모델이 추론한 결과를 비교합니다.
with torch.no_grad():
x = batch[0].to(device)
recon_x = unet(x)
recon_x = recon_x.cpu()
x_grid = make_grid(x.cpu(), nrow=12).numpy()
recon_x_grid = make_grid(recon_x, nrow=12).numpy()
fig, axes = plt.subplots(ncols=2, figsize=(16, 8))
axes[0].set_title("Batch")
axes[0].imshow(x_grid[0], cmap="gray")
axes[1].set_title("Batch reconstruction")
axes[1].imshow(recon_x_grid[0], cmap="gray")
위 코드를 수행하면 아래와 같은 결과를 얻을 수 있습니다.
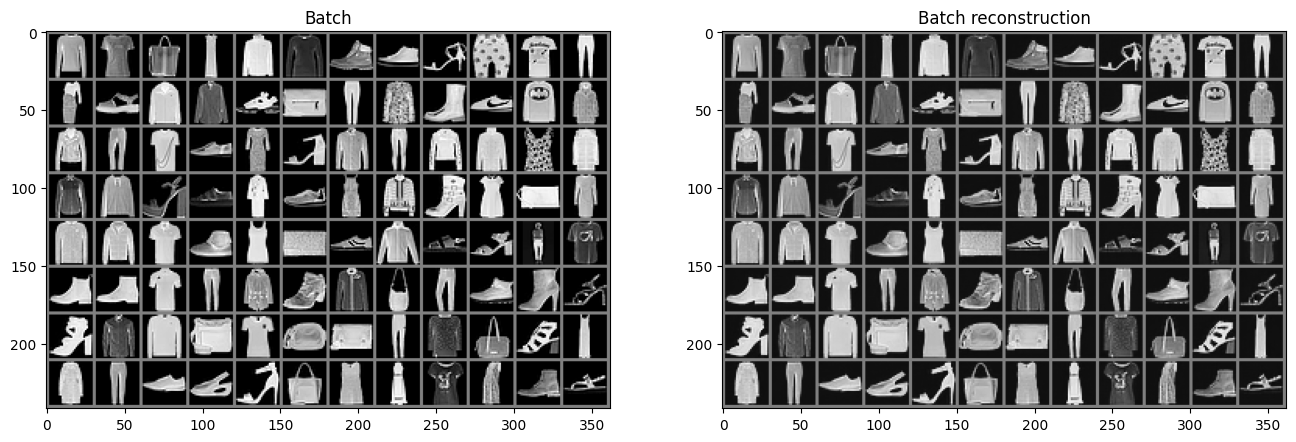
적은 에폭으로 모델을 학습했지만 정상적으로 재현되는 것을 확인할 수 있었습니다.