Deep Convolutional GAN
이번 페이지에서는 CNN 을 이용해 이미지 생성 모델의 시작을 알린 DCGAN (Deep Convolutional GAN) 을 이용해 생성형 모델을 학습하는 방법에 대해서 설명합니다.
Paper
논문에서는 안정적인 DCGAN 을 학습하기 위한 가이드라인을 �아래와 같이 제시했습니다.
Architecture guidelines for stable Deep Convolutional GANs
- Replace anypooling layers with strided convolutions (discriminator) and fractional-strided convolutions (generator).
- Use batchnorm in both the generator and the discriminator.
- Remove fully connected hidden layers for deeper architectures.
- Use ReLU activation in generator for all layers except for the output, which uses Tanh.
- Use LeakyReLU activation in the discriminator for all layers
기본적인 학습방법은 Generative Adversarial Networks 논문을 따릅니다. 이를 위한 파이썬 수도 코드를 작성하면 아래와 같습니다.
for epoch in range(n_epochs):
for batch in loader:
#
# 1. get discriminator loss from real data
#
...
#
# 2. get discriminator loss from fake data
#
...
#
# 3. get discriminator loss and update discriminator
#
...
#
# 4. get generator loss and update generator
#
...
이제부터 해당하는 내용들을 채워 보겠습니다.
Dataset
우선 튜토리얼에 들어가기에 앞서 사용할 데이터셋을 선언합니다. 데이터셋에 대한 자세한 설명은 CelebA 페이지에서 확인할 수 있습니다.
All models are trained with mini-batch stochastic gradient descent (SGD) with a mini-batch size of 128.
논문에서는 배치 사이즈를 128 을 사용해 학습했기 때문에 batch_size=128 로 주겠습니다.
import torchvision.transforms as T
from torchvision.datasets.celeba import CelebA
from torch.utils.data import DataLoader
from torchvision.utils import make_grid
transform = T.Compose(
[
T.Resize(64),
T.CenterCrop(64),
T.ToTensor(),
T.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)),
]
)
dataset = CelebA(
"./datasets", download=True, transform=transform
)
loader = DataLoader(dataset, batch_size=128, shuffle=True)
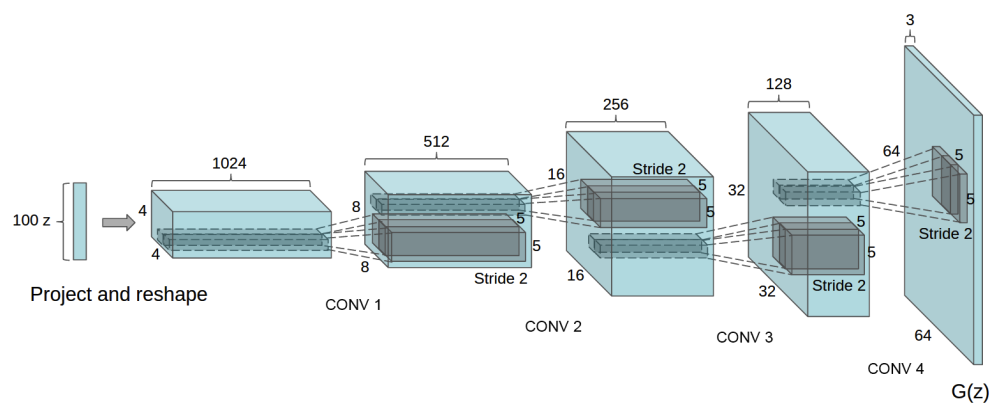
Generator
Code
작성할 모델의 아키텍쳐는 논문에서 제시한 형태를 따라갑니다.
import torch
import torch.nn as nn
class Generator(nn.Module):
def __init__(self, num_channel=3, latent_dim=100, feature_dim=64):
super().__init__()
self.layer_1 = nn.Sequential(
nn.ConvTranspose2d(latent_dim, feature_dim * 8, 4, 1, 0, bias=False),
nn.BatchNorm2d(feature_dim * 8),
nn.ReLU(True),
)
self.layer_2 = nn.Sequential(
nn.ConvTranspose2d(feature_dim * 8, feature_dim * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim * 4),
nn.ReLU(True),
)
self.layer_3 = nn.Sequential(
nn.ConvTranspose2d(feature_dim * 4, feature_dim * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim * 2),
nn.ReLU(True),
)
self.layer_4 = nn.Sequential(
nn.ConvTranspose2d(feature_dim * 2, feature_dim, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim),
nn.ReLU(True),
)
self.last_layer = nn.Sequential(
nn.ConvTranspose2d(feature_dim, num_channel, 4, 2, 1, bias=False),
nn.Tanh(),
)
def forward(self, z):
# decoding
layer_1_out = self.layer_1(z) # (N, 512, 4, 4)
layer_2_out = self.layer_2(layer_1_out) # (N, 256, 8, 8)
layer_3_out = self.layer_3(layer_2_out) # (N, 128, 16, 16)
layer_4_out = self.layer_4(layer_3_out) # (N, 64, 32, 32)
# transform to rgb
out = self.last_layer(layer_4_out) # (N, 3, 64, 64)
return out
안정적인 학습을 위해 위에서 제시된 항목들을 지켜서 아키텍쳐를 구성했습니다.
Architecture guidelines for stable Deep Convolutional GANs
- Replace any pooling layers with fractional-strided convolutions (generator).
- Use batchnorm in the generator.
- Remove fully connected hidden layers for deeper architectures.
- Use ReLU activation in generator for all layers except for the output, which uses Tanh.
Execution
이번에는 생성기의 내부 코드가 어떻게 동작하는 지 확인해 보도록 하겠습니다.
latent_dim = 100
generator = Generator(latent_dim=latent_dim)
z = torch.rand(128, latent_dim, 1, 1) # (N, 100, 1, 1)
with torch.no_grad(): # decoding
layer_1_out = generator.layer_1(z) # (N, 512, 4, 4)
layer_2_out = generator.layer_2(layer_1_out) # (N, 256, 8, 8)
layer_3_out = generator.layer_3(layer_2_out) # (N, 128, 16, 16)
layer_4_out = generator.layer_4(layer_3_out) # (N, 64, 32, 32) # transform to rgb
out = generator.last_layer(layer_4_out) # (N, 3, 64, 64)
- 입력
z- 생성기의 입력값은 생성할 이미지들의 정보가 있는 latent space 에서 추출한 값입니다.
- 이 텐서의 차원은 (N, 100, 1, 1) 입니다.
- 실행을 한 후 각 중간 텐서들의 shape 을 확인하면 다음과 같이 됩니다.
- (N, 512, 4, 4)
- (N, 256, 8, 8)
- (N, 128, 16, 16)
- (N, 64, 32, 32)
- 출럭
out- 최종 출력으로 나오는 데이터는 이미지입니다.
- 그렇기 때문에 텐서의 차원은 (N, 3, 64, 64) 입니다.
- 각각 배치수, 채널수, 넓이, 높이 입니다.
Visualize
학습되지 않은 생성기가 생성하는 이미지를 확인하면 아래처럼 의미없는 노이즈들이 출력됩니다.
import numpy as np
import matplotlib.pyplot as plt
from torchvision.utils import make_grid
out_x_grid = make_grid(out, nrow=12).numpy()
plt.figure(figsize=(8, 8))
plt.title("First batch")
# make data range to 0~1
out_x_grid = (out_x_grid * 0.5) + 0.5
plt.imshow(np.transpose(out_x_grid, (1, 2, 0)))
Discriminator
이제 생성된 데이터 가짜 데이터와 진짜 데이터를 분류할 모델을 작성해 보겠습니다.
Code
class Discriminator(nn.Module):
def __init__(self, num_channel=3, feature_dim=64):
super().__init__()
self.layer_1 = nn.Sequential(
nn.Conv2d(num_channel, feature_dim, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim),
nn.LeakyReLU(0.2, inplace=True),
)
self.layer_2 = nn.Sequential(
nn.Conv2d(feature_dim, feature_dim * 2, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim * 2),
nn.LeakyReLU(0.2, inplace=True),
)
self.layer_3 = nn.Sequential(
nn.Conv2d(feature_dim * 2, feature_dim * 4, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim * 4),
nn.LeakyReLU(0.2, inplace=True),
)
self.layer_4 = nn.Sequential(
nn.Conv2d(feature_dim * 4, feature_dim * 8, 4, 2, 1, bias=False),
nn.BatchNorm2d(feature_dim * 8),
nn.LeakyReLU(0.2, inplace=True),
)
self.last_layer = nn.Sequential(
nn.Conv2d(feature_dim * 8, 1, 4, 1, 0, bias=False), nn.Sigmoid()
)
def forward(self, x):
# encoding
layer_1_out = self.layer_1(x) # (N, 64, 32, 32)
layer_2_out = self.layer_2(layer_1_out) # (N, 128, 16, 16)
layer_3_out = self.layer_3(layer_2_out) # (N, 256, 8, 8)
layer_4_out = self.layer_4(layer_3_out) # (N, 512, 4, 4)
# classify
out = self.last_layer(layer_4_out).squeeze() # (N)
return out
안정적인 학습을 위해 위에서 제시된 항목들을 지켜서 아키텍쳐를 구성했습니다.
Architecture guidelines for stable Deep Convolutional GANs
- Replace any pooling layers with strided convolutions (discriminator).
- Use batchnorm in the discriminator.
- Remove fully connected hidden layers for deeper architectures.
- Use LeakyReLU activation in the discriminator for all layers
Execution
이번에는 분류기의 내부 코드가 어떻게 동작하는 지 확인해 보도록 하겠습니다.
discriminator = Discriminator()
for batch in loader:
x = batch[0]
break
with torch.no_grad(): # encoding
layer_1_out = discriminator.layer_1(x) # (N, 64, 32, 32)
layer_2_out = discriminator.layer_2(layer_1_out) # (N, 128, 16, 16)
layer_3_out = discriminator.layer_3(layer_2_out) # (N, 256, 8, 8)
layer_4_out = discriminator.layer_4(layer_3_out) # (N, 512, 4, 4) # classify
out = discriminator.last_layer(layer_4_out).squeeze() # (N)
- 입력
x- 분류기의 입력값은 생성된 혹은 진짜 이미지 입니다.
- 그렇기 때문에 입력 텐서의 차원은 (N, 3, 64, 64) 입니다.
- 실행을 한 후 각 중간 텐��서들의 shape 을 확인하면 다음과 같이 됩니다.
- (N, 64, 32, 32)
- (N, 128, 16, 16)
- (N, 256, 8, 8)
- (N, 512, 4, 4)
- 출럭
out- 최종 출력으로 나오는 데이터는 각 이미지들의 진짜 혹은 가짜를 구분하기 위한 확률값입니다.
- 이 때,
discriminator.last_layer레이어를 통해서 나온 결과는(N, 1, 1, 1)의 shape 을 갖습니다. squeeze(): 좀 더 활용하기 쉽게squeeze옵션을 통해서 1로 이루어진 모든 차원을 제거해(N, 1)shape 으로 변경합니다.
분류된 결과물을 간단하게 확인해보면 0~1 사이의 숫자로 이루어진 확률값입니다.
out[:10]
tensor([0.4386, 0.5597, 0.5724, 0.4969, 0.4873, 0.4456, 0.5770, 0.5647, 0.4118,
0.4347])
Train
이제 모델을 학습하고 학습된 모델을 이용해 이미지를 생성하는 결과를 확인해 보겠습니다.
학습 알고리즘은 논문에서 제시한 방법 중 일부를 따릅니다.
제시된 내용은 아래와 같습니다.
- All models are trained with mini-batch stochastic gradient descent (SGD) with a mini-batch size of 128.
- All weights were initialized from a zero-centered Normal distribution with standard deviation 0.02
- In the LeakyReLU, the slope of the leak was set to 0.2 in all models.
- While previous GAN work has used momentum to accelerate training, we used the Adam optimizer (Kingma & Ba, 2014) with tuned hyperparameters. We found the suggested learning rate of 0.001, to be too high, using 0.0002 instead.
- We found leaving the momentum term β1 at the suggested value of 0.9 resulted in training oscillation and instability while reducing it to 0.5 helped stabilize training.
이 중 에서 사용할 방법은 아래와 같습니다.
- 학습 배치 사이즈는 128
- 모델 파라미터들을 분산이 0.02 인 정규 분포로 초기화
- LeakyReLU 의 slope 는 0.2
- Adam 학습기를 사용하고 leraning_rate 는 0.0002 를 사용
- β1 은 0.5로 설정
Weight Initialization
파라미터 초기화를 위한 함수를 작성합니다.
def weights_init(m):
classname = m.__class__.__name__
if classname.find("Conv") != -1:
nn.init.normal_(m.weight.data, 0.0, 0.02)
elif classname.find("BatchNorm") != -1:
nn.init.normal_(m.weight.data, 1.0, 0.02)
nn.init.constant_(m.bias.data, 0)
각 모델에 적용합니다.
_ = generator.apply(weights_init)
_ = discriminator.apply(weights_init)
Convolution Network 는 원활한 학습을 위해서는 gpu 가 필요합니다. GPU 가 없는 경우 학습에 다소 시간이 소요될 수 있습니다.
아래 코드를 이용해 device 를 선언합니다.
만약 gpu 가 사용 가능한 경우 device(type='cuda') 메세지가 나옵니다.
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
device(type='cuda')
위에서 선언한 모델을 gpu 메모리로 옮기겠습니다.
_ = discriminator.to(device)
_ = generator.to(device)
Logger
학습 과정을 tensorboard 에 저장하기 위한 writer 입니다.
from torch.utils.tensorboard import SummaryWriter
# tensorboard logger
writer = SummaryWriter()
Loss
GAN 모델의 학습은 분류기의 분류 결과로 부터 시작됩니다. 이 때 진짜로 구분은 1 가짜로 구분은 0으로 하는 이진 분류로서 BinaryCrossEntropy 를 이용해 계산합니다.
# loss function
bce_loss_fn = nn.BCELoss()
Optimizer
논문에서는 SGD 를 Optimizer 로 제시했지만 Adam 이 좀 더 안정적인 학습을 할 수 있기에 Adam 으로 선언합니다.
import torch.optim as optim
# optimizer
discriminator_opt = optim.Adam(
discriminator.parameters(), lr=0.0002, betas=(0.5, 0.999)
)
generator_opt = optim.Adam(generator.parameters(), lr=0.0002, betas=(0.5, 0.999))
아래 코드를 작성 후 학습을 진행합니다.
Code
from tqdm import tqdm
# meta data
n_epochs = 5
# for visualization
iteration = 0
fixed_z = torch.randn((64, latent_dim, 1, 1)).to(device)
# for iteration history
G_loss_history = []
D_loss_history = []
# train code
for epoch in range(n_epochs):
epoch_G_loss = 0.0
epoch_D_loss = 0.0
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
generator.train()
discriminator.train()
x = batch[0].to(device)
batch_size = x.size(0)
#
# 1. get discriminator loss from real data
#
discriminator_opt.zero_grad()
real_D_score = discriminator(x)
real_target = torch.ones_like(real_D_score).to(device)
real_D_loss = bce_loss_fn(real_D_score, real_target)
#
# 2. get discriminator loss from fake data
#
z = torch.randn((batch_size, latent_dim, 1, 1)).to(device)
fake_data = generator(z)
fake_D_score = discriminator(fake_data)
fake_target = torch.zeros_like(fake_D_score).to(device)
fake_D_loss = bce_loss_fn(fake_D_score, fake_target)
#
# 3. get discriminator loss and update discriminator
#
D_loss = real_D_loss + fake_D_loss
D_loss.backward()
discriminator_opt.step()
#
# 4. get generator loss and update generator
#
generator_opt.zero_grad()
z = torch.randn((batch_size, latent_dim, 1, 1)).to(device)
generated_data = generator(z)
generate_D_score = discriminator(generated_data)
generate_target = torch.ones_like(generate_D_score).to(device)
G_loss = bce_loss_fn(generate_D_score, generate_target)
G_loss.backward()
generator_opt.step()
# iteration logging
G_loss_history += [G_loss.item()]
D_loss_history += [D_loss.item()]
epoch_D_loss += D_loss.item() * len(x) / len(loader.dataset)
epoch_G_loss += G_loss.item() * len(x) / len(loader.dataset)
writer.add_scalar("Loss/generator", G_loss, iteration)
writer.add_scalar("Loss/discriminator", D_loss, iteration)
# iteration checkpoint
if iteration % 1000 == 0:
# visualization
with torch.no_grad():
generated_x = generator(fixed_z)
generated_x = generated_x.detach().cpu()
generated_x_grid = make_grid(generated_x, nrow=8).numpy()
generated_x_grid = (generated_x_grid * 0.5) + 0.5
generated_x_grid = np.transpose(generated_x_grid, (1, 2, 0))
plt.imsave(f"dcgan-step-{iteration}.png", generated_x_grid)
# model save
torch.save(generator, f"dcgan-generator-step-{iteration}.pt")
iteration += 1
log_string = f"Loss at epoch {epoch + 1} - D_loss : {epoch_D_loss:.4f}, G_loss : {epoch_G_loss:.4f}"
print(log_string)
# save last model
with torch.no_grad():
generated_x = generator(fixed_z)
generated_x = generated_x.detach().cpu()
generated_x_grid = make_grid(generated_x, nrow=8).numpy()
generated_x_grid = (generated_x_grid * 0.5) + 0.5
generated_x_grid = np.transpose(generated_x_grid, (1, 2, 0))
plt.imsave(f"dcgan-step-{iteration}.png", generated_x_grid)
torch.save(generator, f"dcgan-generator-step-{iteration}.pt")
Epoch 1/5: 100%|██████████| 1272/1272 [03:20<00:00, 6.34it/s]
Loss at epoch 1 - D_loss : 0.6342, G_loss : 7.3766
Epoch 2/5: 100%|██████████| 1272/1272 [03:18<00:00, 6.41it/s]
Loss at epoch 2 - D_loss : 0.6417, G_loss : 3.8137
Epoch 3/5: 100%|██████████| 1272/1272 [03:18<00:00, 6.42it/s]
Loss at epoch 3 - D_loss : 0.6967, G_loss : 2.9740
Epoch 4/5: 100%|██████████| 1272/1272 [03:17<00:00, 6.44it/s]
Loss at epoch 4 - D_loss : 0.7547, G_loss : 2.5252
Epoch 5/5: 100%|██████████| 1272/1272 [03:18<00:00, 6.41it/s]
Loss at epoch 5 - D_loss : 0.7395, G_loss : 2.4700
제일 처음에는 데이터 로더에서 실제 이미지를 분류기를 통해서 1로 분류하는 loss 를 계산합니다.
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
x = batch[0].to(device)
#
# 1. get discriminator loss from real data
#
discriminator_opt.zero_grad()
real_D_score = discriminator(x)
real_target = torch.ones_like(real_D_score).to(device)
real_D_loss = bce_loss_fn(real_D_score, real_target)
...
이어서 임의의 latent z 를 선언하고 생성기를 통해서 가짜 이미지를 만듭니다. 이후 생성된 이미지를 분류기가 0으로 분류하는 loss 를 계산합니다.
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
#
# 2. get discriminator loss from fake data
#
z = torch.randn((batch_size, latent_dim, 1, 1)).to(device)
fake_data = generator(z)
fake_D_score = discriminator(fake_data)
fake_target = torch.zeros_like(fake_D_score).to(device)
fake_D_loss = bce_loss_fn(fake_D_score, fake_target)
...
두 loss 를 합쳐서 분류기가 생성된 이미지와 실제 이미지를 잘 구분할 수 있도록 학습합니다.
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
#
# 3. get discriminator loss and update discriminator
#
D_loss = real_D_loss + fake_D_loss
D_loss.backward()
discriminator_opt.step()
...
앞선 과정에서 분류기에 대한 부분을 학습했다면 이제 생성기가 더 잘 생성할 수 있도록 학습해야 합니다. 이를 위해서 생성된 이미지를 분류기로 분류하고 이에 대한 loss 를 앞선 분류기에서 생성된 이미지에 대해서 0으로 준 것과 반대로 1로 설정합니다. 이를 통해서 분류기를 속이기 위한 gradient 값을 계산해서 생성기를 업데이트합니다.
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
#
# 4. get generator loss and update generator
#
generator_opt.zero_grad()
z = torch.randn((batch_size, latent_dim, 1, 1)).to(device)
generated_data = generator(z)
generate_D_score = discriminator(generated_data)
generate_target = torch.ones_like(generate_D_score).to(device)
G_loss = bce_loss_fn(generate_D_score, generate_target)
G_loss.backward()
generator_opt.step()
...
위에서 학습의 결과물을 logging 하기 위한 코드입니다.
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
# iteration logging
G_loss_history += [G_loss.item()]
D_loss_history += [D_loss.item()]
epoch_D_loss += D_loss.item() * len(x) / len(loader.dataset)
epoch_G_loss += G_loss.item() * len(x) / len(loader.dataset)
writer.add_scalar("Loss/generator", G_loss, iteration)
writer.add_scalar("Loss/discriminator", D_loss, iteration)
...
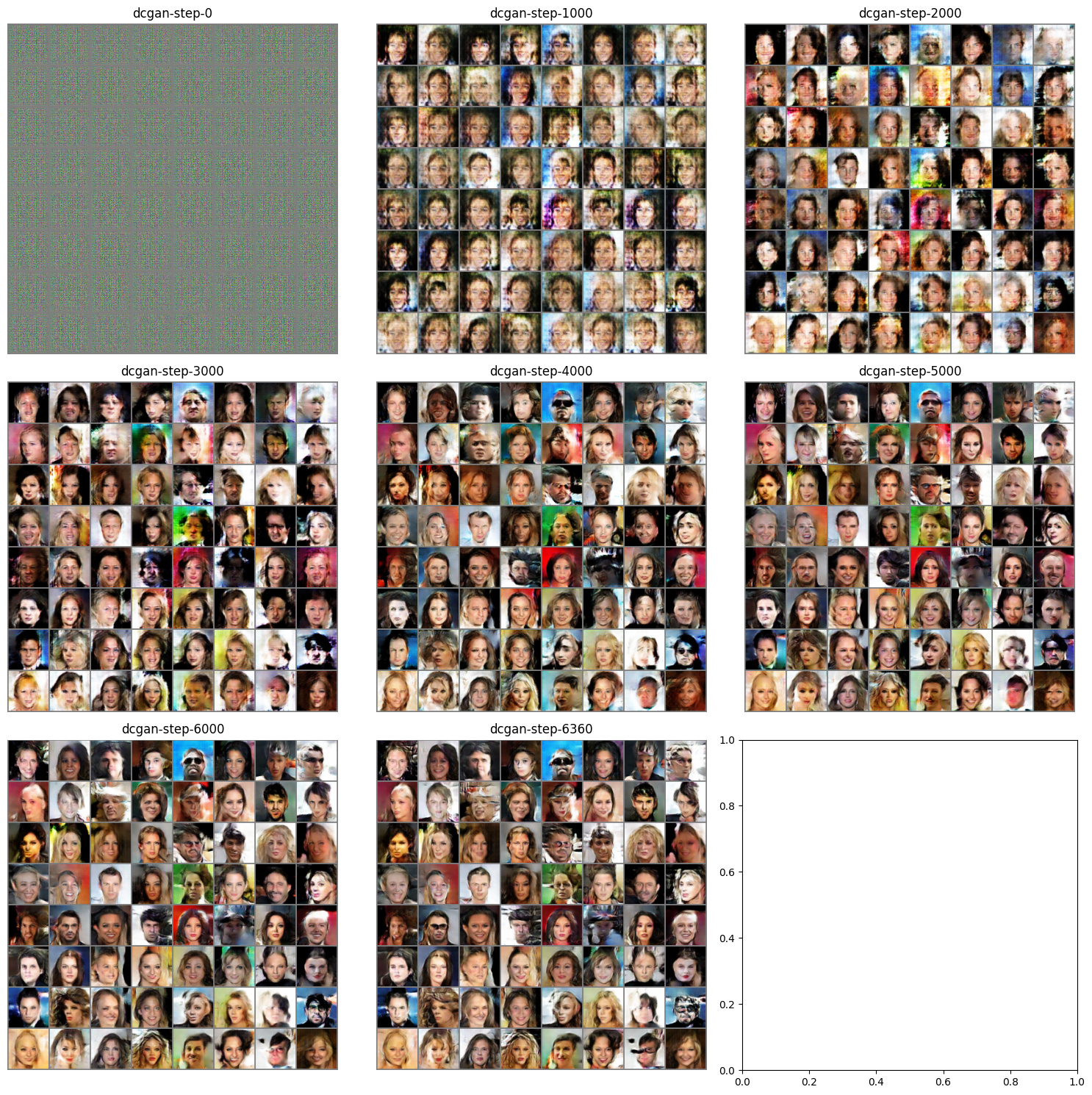
아래 코드는 고정된 z 에 대해서 모델이 학습하면서 생성하는 그림이 어떻게 바뀌는지 저장하기 위한 코드입니다.
# for visualization
iteration = 0
fixed_z = torch.randn((64, latent_dim, 1, 1)).to(device)
# train code
for epoch in range(n_epochs):
...
for batch in tqdm(loader, desc=f"Epoch {epoch + 1}/{n_epochs}"):
...
# iteration checkpoint
if iteration % 1000 == 0:
# visualization
with torch.no_grad():
generated_x = generator(fixed_z)
generated_x = generated_x.detach().cpu()
generated_x_grid = make_grid(generated_x, nrow=8).numpy()
generated_x_grid = (generated_x_grid * 0.5) + 0.5
generated_x_grid = np.transpose(generated_x_grid, (1, 2, 0))
plt.imsave(f"dcgan-step-{iteration}.png", generated_x_grid)
...
Loss history
Tensorboard 에 로깅된 학습 정보를 확인하면 다음과 같습니다.

Visualize
학습을 하면서 생성기가 어떻게 이미지를 생성하는 지 확인해 보겠습니다.
import os
img_list = list(sorted(filter(lambda x: x.startswith("dcgan-step"), os.listdir("."))))
nrows = (len(img_list) // 3) + 1
fig, axes = plt.subplots(ncols=3, nrows=nrows, figsize=(5 * nrows, 15))
for idx, fname in enumerate(img_list):
array = plt.imread(fname)
axes[idx // 3, idx % 3].imshow(array)
axes[idx // 3, idx % 3].axis("off")
axes[idx // 3, idx % 3].set_title(fname.replace(".png", ""))
plt.tight_layout()
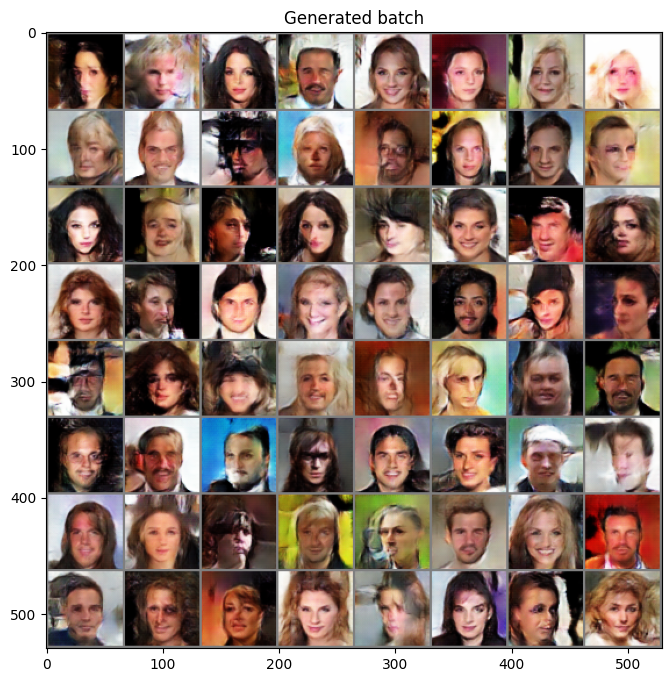
Generation
이번에는 학습한 모델의 디코더를 이용해 랜덤한 latent 값을 주었을 때 어떤 이미지를 생성하는 지 확인해 보겠습니다.
다만 이번 생성기의 경우 BatchNorm 을 사용하기 때문에 학습과 평가 모드에 따라서 동작이 달라집니다.
학습이 끝난 모델을 사용하기 위해서는 eval() 모드를 설정해주어야 합니다.
generator.eval()
with torch.no_grad():
random_z = torch.randn((64, latent_dim, 1, 1)).to(device)
generated_x = generator(random_z)
generated_x_grid = make_grid(generated_x, nrow=8).cpu().numpy()
# make data range to 0~1
generated_x_grid = (generated_x_grid * 0.5) + 0.5
plt.figure(figsize=(8, 8))
plt.title("Generated batch")
plt.imshow(np.transpose(generated_x_grid, (1, 2, 0)))